Aparece el altruismo entre robots mediante mecanismos evolutivos al uso si hay "parentesco" entre ellos.
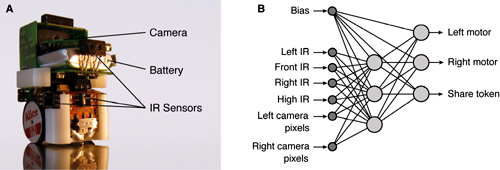 |
| Uno de los robots (A) y la red neuronal que se simula (B). Fuente: Markus Waibel1, Dario Floreano y Laurent Keller. |
|
El origen del altruismo y la cooperación en humanos y animales sociales ha sido un asunto complicado de explicar por parte de la teoría evolutiva. ¿Existen los genes altruistas?
Ahora, el especialista en robótica Dario Floreano y el biólogo Laurent Keller arrojan luz sobre el asunto. Han usado robots muy simples para simular la evolución genética en cientos de generaciones y proporcionado pruebas de las implicaciones que tiene la selección sobre la aparición del altruismo cuando hay parentesco.
El altruismo consiste en el sacrificio de las ganancias individuales para conseguir un bien superior para la comunidad o un semejante. Pero la idea elemental de selección natural operando sobre los individuos y seleccionando aquellos con mayor éxito reproductor no parece explicar su origen. Simplemente parece que si surgen los genes altruistas deben ser eliminados por selección natural. Sin embargo, en la Naturaleza se han encontrado genes altruistas que son expresados y pasan de generación en generación. Así por ejemplo, las obreras de un hormiguero son estériles y sacrifican sus vidas por una colonia en la que sólo la reina y machos se reproducen, simplemente no transmiten sus genes y su comportamiento debía ser eliminado por la selección natural.
En los años sesenta se propuso el mecanismo de selección de parentesco para explicar el altruismo. Si, por ejemplo, un individuo comparte comida con un familiar cercano, sus posibilidades de supervivencia pueden disminuir, pero a la vez aumenta las posibilidades de que sus genes pasen a la siguiente generación a través de ese familiar, ya que comparte genes con ese familiar. Es lo que se conoce como regla de Hamilton. Según esta idea, la capacidad de compartir comida (o cuidados) sería proporcional al grado de parentesco. En el caso de los insectos sociales esto está mucho acentuado porque las obreras comporten muchos genes con los individuos a los que cuidan debido a un reparto de cromosomas singular.
La regla de Hamilton ha sido muy debatida en círculos académicos porque parece demasiado simple para ser cierta. Recientemente algunos investigadores incluso han desafiado la idea de que el parentesco sea necesario para la evolución del altruismo. Martin Nowak, de la Universidad Harvard, es el principal oponente.
Pero el estudio de esta característica en organismos reales es imposible porque un experimento de estas características necesitaría de cientos de generaciones y además hay demasiadas variables en juego.
Sin embargo, en los experimentos de Floreano, los robots evolucionan rápidamente gracias al uso de genes simulados y además se puede medir bien los costes y beneficios asociados a los distintos rasgos de esos genes. Según Keller los resultados obtenidos se ajustan notablemente bien a la regla de Hamilton y los genes altruistas pasan de una generación a la siguiente.
En experimentos previos estos investigadores ya mostraron que era posible obtener robots forrajeadores que realizasen tareas simples, como empujar semillas por el suelo hasta llevarlas a su destino. Esos robots evolucionaban a lo largo de las distintas generaciones, de este modo, aquellos que no empujan bien las semillas (realmente unos pequeños discos) hasta el sitio adecuado no eran seleccionados para pasar su código informático (genes) a la siguiente generación. Los robots además mutaban y se recombinaban (su código informático se mezclaba como si se reprodujeran entre sí) y los mejores eran seleccionados de tal modo que, con el tiempo, empujaban cada vez mejor las semillas.
Estos robots miden sólo un par de centímetros de alto y tienen dos ruedas operadas de manera independiente. Su “sistema nervioso” está compuesto por sensores y una cámara que les permite detectar esos pequeños discos. No hace falta decir que el soporte físico es siempre el mismo y los “verdaderos individuos” son los programas que controlaban esos robots. Las representaciones virtuales de estos robots tenían lugar en un computador y era ahí donde se simulaban sus genes, mutaciones, reproducción y comportamiento.
En el nuevo estudio añadieron una novedad: cuando los robots empujaban las semillas hasta su sitio tenían que decidir si las compartían o no con otros. En los experimentos, que duraban 500 generaciones, se establecieron distintos escenarios altruistas y distintas relaciones de parentesco entre los individuos. De este modo, en los distintos grupos de individuos podía haber “clones”, “hermanos”, “primos” o podían no estar emparentados según 33 “genes”.
El altruismo surgía rápidamente en el sistema. Los grupos que compartían según las regla de Hamilton funcionaban mejor y pasaban su código a la siguiente generación.
Además, el análisis cuantitativo reveló que el comportamiento de estos robots seguía la regla de Hamilton incluso cuando hay presencia de interacciones múltiples. La regla de Hamilton original tiene una visión limitada y aislada de la interacción entre genes, mientras que las simulaciones genéticas de estos robots integran efectos sobre un gen o múltiples genes y aún así se mantienen las predicciones de la regla de Hamilton.
La evolución de la cooperación no sólo se pueda dar en sistemas biológicos y sociales, sino también en robots. Incluso un robot tan tonto como el tipo usado en estos experimentos puede ser un héroe.
Publicado bajo Copyleft. Enlace original:
http://neofronteras.com/?p=3488
Fuentes y referencias:
Nota de prensa.
Artículo original.








{kind=link}